My sister Grace and I started our adventure to Muncie Indiana on 8-7-23, to attend IRCHA 2023. we took two cars, and communicated with each other via our phones for the entire trip.....I`m glad we both have unlimited talk and text.
We stopped a few times for gas and refreshments, and also at a couple of highway rest areas, to just get out of the cars for a few minutes. The trip up to Muncie was very smooth, and relatively traffic free, and we were able to make good time. We stopped to get a hotel room in Williamstown ( I think that`s the name of the town) Kentucky, and turned in for the night.

The next morning, we got up and loaded the helicopters back into our cars, and went for breakfast at a nearby Cracker Barrel.....Their biscuit benny is fantastic, BTW. After breakfast we topped off the gas tanks, and got back on the road. We arrived at the AMA headquarters at around 16:30 on 8-8-23, and began setting up our camp.


Once camp was set up, we started walking around and saying hi to all of our friends, whom we had not seen since the last event. Then we came back to our camp, and just relaxed and let the fatigue from the long (21 hour) drive wear off.
IRCHA was officially kicked off with the National Anthem, with JC Zankl flying our beloved American Flag around the flight line from one of his vintage helicopters..... It gives me chills every time he does that. Thank you JC, for doing that for us. I for one REALLY appreciate it.
Day one and two were a little slow, and there was not too much going on. It was mostly just a meet and greet for everyone to catch up with each other and just hang out. After that, it started picking up as more and more people started to show up.
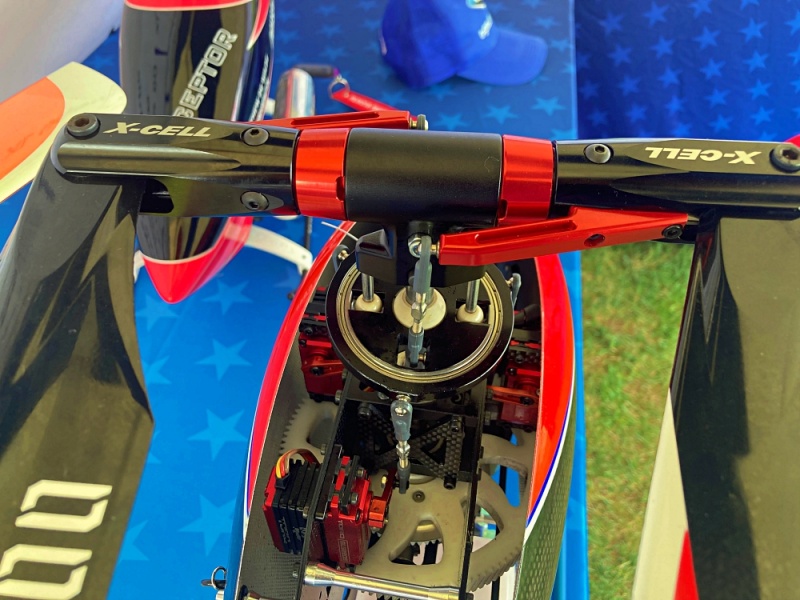
Miniature Aircraft was there in force, and we had a lot of fun doing demos, and showcasing the new Interceptor as well as the new Sukara rotor head and swash plate.




No helicopter event would be complete without the Whiplash Turbine, and we had a few of them on hand. Cade, and Raja put on some spectacular flights with their Turbine Whiplashes, and they really drew a crowd when they fired them up.
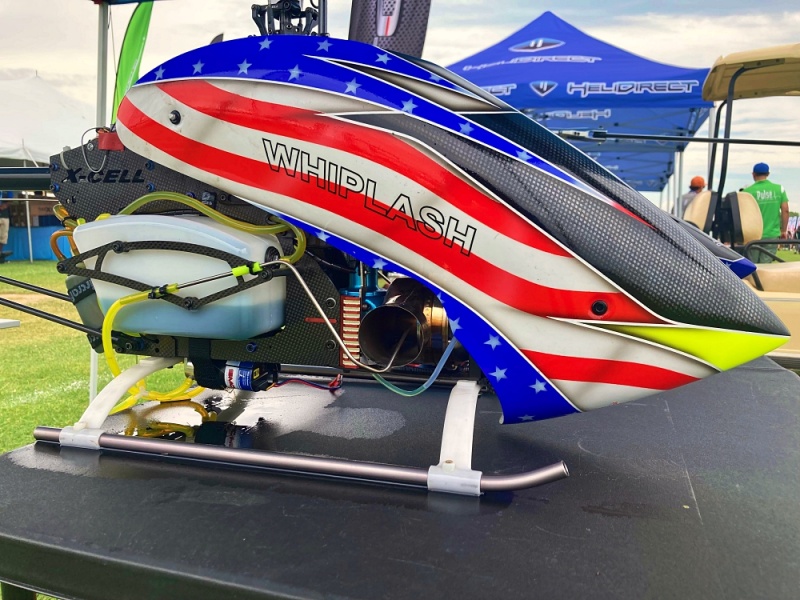
Cade has a smoke oil pump on his Turbine Whiplash, that allows him to pump smoke oil into the exhaust of the engine. Making for a really cool effect when flying. It was truly amazing to watch when he was doing 3D with his Turbine Whiplash.
Although IRCHA 2023 was not as large as previous years, I still call it a success. I had a great time, caught up with a lot of old friends, and made a lot of new ones too.
I also got to do demo flights for Miniature Aircraft, Kontronik Drives, and Helidirect on Friday and Saturday. Plus I competed in Battle of the Brands again this year. I didn`t do as well as I did last time though. I was asked to do it a day before the contest, and I didn`t have any musik, or a routine. So I had to get Leroy to play a hip-hoppy song foe, and wing it....LOL I had a great time though.
But I`m going to be ready for them next year. I`m going to have musik and a routine worked up.......just in case...LOL.

I want to give a very... VERY big thank you to Josef and Judith of Miniature Aircraft for all of the amazing support that they have given to me over the past few years. They are truly wonderful people, who have a deep passion for RC helicopters and the entire RC helicopter community. Team Miniature Aircraft are not just a team. We`re family.















